 Java 學習之路
Java 學習之路
tags: Mindstorms EV3 樂高 視覺化程式語言 機器人
EV3 Tutorial(15)不磕頭機器人
By caterpillar | 2015/10/26不磕頭機器人只使用一個馬達,藉由齒輪帶動,令四隻腳呈現移動時彼此搭配的狀態,組裝時要注意的地方在於,當上圖中黑齒輪(Double Conical wheel)上兩個組裝點(Bush for cross axle)都是在內側同一線上時,另一邊的黑齒輪上兩個組裝點都是在外側同一線上...

tags: 推文
CodeData 推文整理 - 2015 / 8、9
By Code & Data | 2015/10/01好推不沉底,CodeData 推文整理又來囉!這次八、九月一次整理,有哪些遺漏的資訊呢?來一次檢視一下吧!
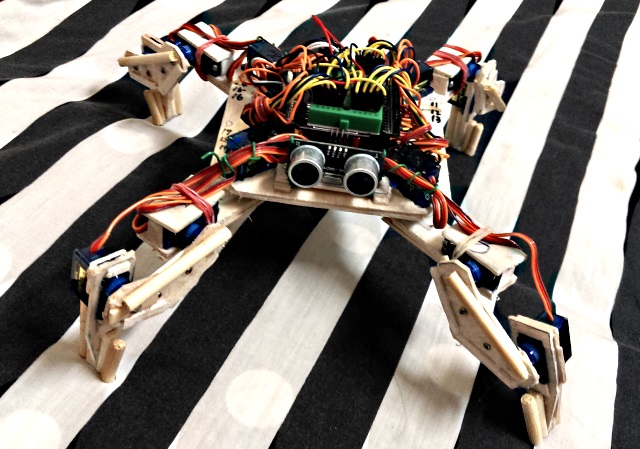
廢材四足機器人(三)一點點的程式設計說明
By caterpillar | 2015/09/25相較於組裝廢材機器人與足態的決定,程式設計方面是比較簡單的,稍微有點程式設計底子,應該都可以看得懂 Github 上的程式,這邊主要就來解釋一下,程式上我的基本想法是什麼。
mBlock & Arduino(20)探討 Me-Baseboard 與各模組相容性
By caterpillar | 2015/09/17Me-Baseboard 與相關模組是不是只能使用 mBlock 來撰寫程式驅動?Me-Baseboard 是不是可以接其他模組? Makeblock 模組是不是可以直接用在 Arduino Uno 等板子上?
tags: Mindstorms EV3 樂高 視覺化程式語言 機器人



