 Java 學習之路
Java 學習之路





tags: Mindstorms EV3 樂高 視覺化程式語言 機器人
EV3 Tutorial(15)不磕頭機器人
By caterpillar | 2015/10/26不磕頭機器人只使用一個馬達,藉由齒輪帶動,令四隻腳呈現移動時彼此搭配的狀態,組裝時要注意的地方在於,當上圖中黑齒輪(Double Conical wheel)上兩個組裝點(Bush for cross axle)都是在內側同一線上時,另一邊的黑齒輪上兩個組裝點都是在外側同一線上...
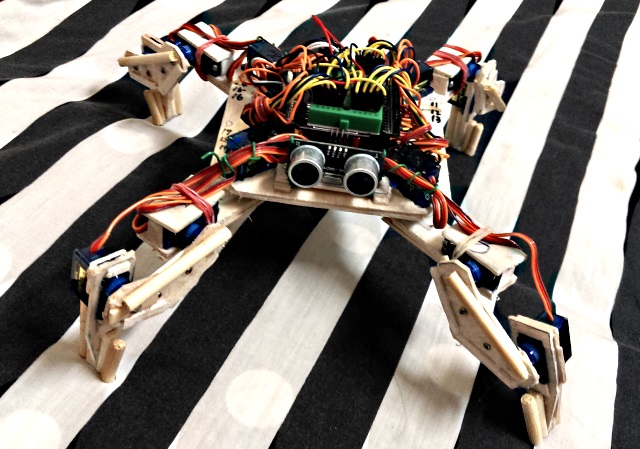
廢材四足機器人(三)一點點的程式設計說明
By caterpillar | 2015/09/25相較於組裝廢材機器人與足態的決定,程式設計方面是比較簡單的,稍微有點程式設計底子,應該都可以看得懂 Github 上的程式,這邊主要就來解釋一下,程式上我的基本想法是什麼。
mBlock & Arduino(20)探討 Me-Baseboard 與各模組相容性
By caterpillar | 2015/09/17Me-Baseboard 與相關模組是不是只能使用 mBlock 來撰寫程式驅動?Me-Baseboard 是不是可以接其他模組? Makeblock 模組是不是可以直接用在 Arduino Uno 等板子上?
tags: Mindstorms EV3 樂高 視覺化程式語言 機器人

tags: Java Docker 虛擬化 門外漢 Raspberry Pi
門外漢的 Raspberry Pi 2 運行 Docker
By caterpillar | 2015/09/02好久沒來當門外漢撞牆了,最近想到將自己的一些虛擬機(環境)需求,移到 Raspberry Pi 2 上有沒有可能,於是就想到在 Raspberry Pi 2 上跑 Docker …
mBlock & Arduino(19)透過網路調節 LED 亮度
By caterpillar | 2015/08/24mBlock 具有網路連接功能,兩台電腦分別開啟 mBlock,就可以進行網路通訊,也就是說,你可以透過網路控制另一頭連接的 Arduino,反之亦然。
廢材四足機器人(二)電路連接、靜態平行與足態設計
By caterpillar | 2015/08/20只使用一個電源,這個電源既供應控制板電流,也供應馬達所需的電流,這樣可以很快地耗用掉兩顆 3.7V 14500 可充電鋰電池的電力,持續運轉差不多半個多小時就可以用光光吧!... XD
mBlock & Arduino(18)74HC595 與七段顯示器
By caterpillar | 2015/08/08如果想減少 Arduino 上的腳位佔用,那麼可以使用 4511 或 74HC595 等驅動 IC,或者是選用市面上現成的七段顯示器模組。
廢材四足機器人(一)修修補補成廢材
By caterpillar | 2015/07/30我選用的飛機木稍微薄了一點,因此動用了冰棒棍、竹筷來增加強度,也不是一開始就做正確,使用飛機木的好處就是要修正也很容易,總之也是修正、修正再修正,最後就成了廢材機器人 ... XD
mBlock & Arduino(17)四位數七段顯示器
By caterpillar | 2015/07/27如果你需要多個位數,基本上可以自行連接多個七段顯示器,只是七段顯示器需要的腳位很多啊?Arduino 腳位不夠用怎麼辦?



