 Java 學習之路
Java 學習之路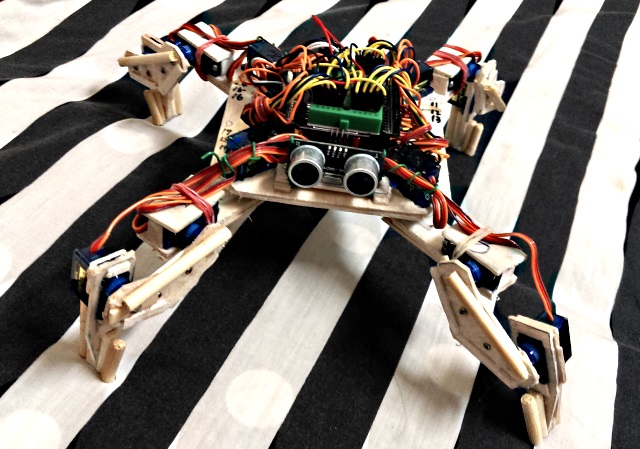
廢材四足機器人(三)一點點的程式設計說明
By caterpillar | 2015/09/25相較於組裝廢材機器人與足態的決定,程式設計方面是比較簡單的,稍微有點程式設計底子,應該都可以看得懂 Github 上的程式,這邊主要就來解釋一下,程式上我的基本想法是什麼。
廢材四足機器人(二)電路連接、靜態平行與足態設計
By caterpillar | 2015/08/20只使用一個電源,這個電源既供應控制板電流,也供應馬達所需的電流,這樣可以很快地耗用掉兩顆 3.7V 14500 可充電鋰電池的電力,持續運轉差不多半個多小時就可以用光光吧!... XD
廢材四足機器人(一)修修補補成廢材
By caterpillar | 2015/07/30我選用的飛機木稍微薄了一點,因此動用了冰棒棍、竹筷來增加強度,也不是一開始就做正確,使用飛機木的好處就是要修正也很容易,總之也是修正、修正再修正,最後就成了廢材機器人 ... XD
mBlock & Arduino(9)伺服馬達控制
By caterpillar | 2015/05/13伺服馬達的基本原理是接受 PWM 訊號,經由內部電路計算出馬達的轉動角度 ... 大多數伺服馬達旋轉角度是 0 到 180 度,PWM 訊號的頻率必須是 50 Hz,控制馬達角度的脈衝持續時間約是 1.0 ms 到 2.0 ms ...

tags: Java 教學 Java Embedded Raspberry Pi 樂高 伺服馬達
Java Embedded (12)整合應用 – PiFan
By Michael | 2015/03/30停車場模擬系統使用兩個超音波感應器偵測物體的距離,一般的應用都需要在判斷物體接近與離開一定的距離時,執行一些特定的工作。



